
ESP32(-S3) LEDC complementary output with programmable dead time example
On the ESP32 platform, you can use the LEDC PWM driver to generate programmable dead time by setting the duty (i.e. length of pulse) and hpoint(time offset of pulse) appropriately.
esp32_ledc_complementary.cpp
#include <driver/ledc.h>example.cpp
ledc_timer_config_t ledc_timer = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_8_BIT,
.timer_num = LEDC_TIMER_0,
.freq_hz = 100000,
.clk_cfg = LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer));
uint32_t deadTime = 20; // Large value to show clearly on the oscilloscope
ledc_channel_config_t ledc_noninverted_channel = {
.gpio_num = GPIO_NUM_10,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_0,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = LEDC_TIMER_0,
.duty = 127-deadTime/2, // Set duty to 50%
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_noninverted_channel));
ledc_channel_config_t ledc_complementary_channel = {
.gpio_num = GPIO_NUM_11,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_1,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = LEDC_TIMER_0,
.duty = 127-deadTime/2, // Set cycle to start just after 50%
.hpoint = 127,
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc_complementary_channel));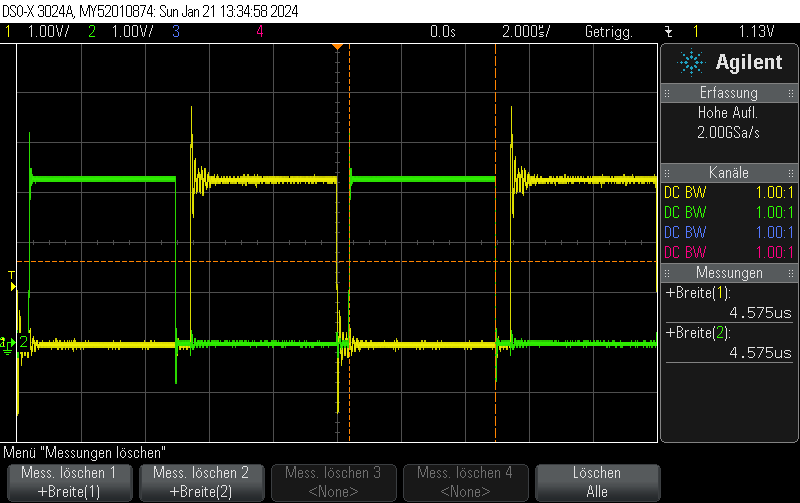
Check out similar posts by category:
ESP8266/ESP32
If this post helped you, please consider buying me a coffee or donating via PayPal to support research & publishing of new posts on TechOverflow