This Arduino/PlatformIO firmware outputs 50% duty cycle PWM at different frequencies on multiple pins using the LEDC PWM driver, utilizing all four timers:
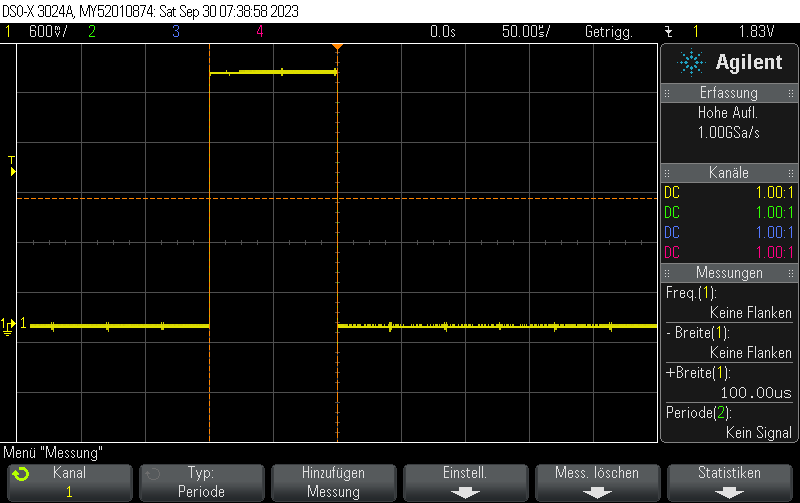
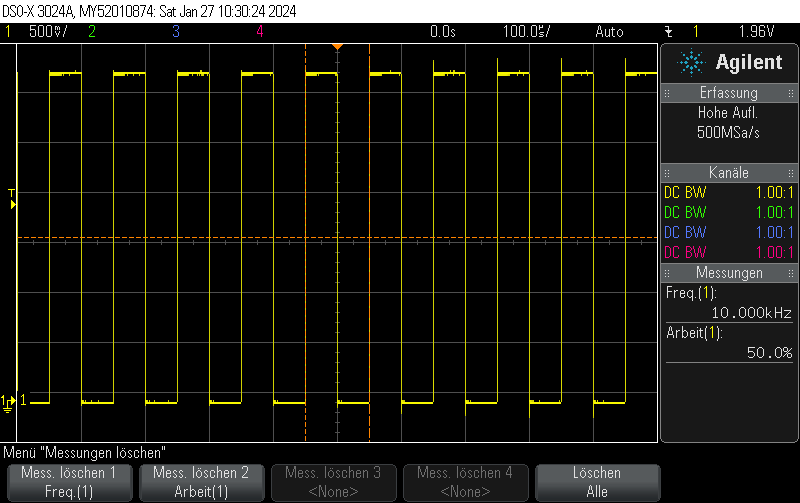
- 10 kHz on GPIO10
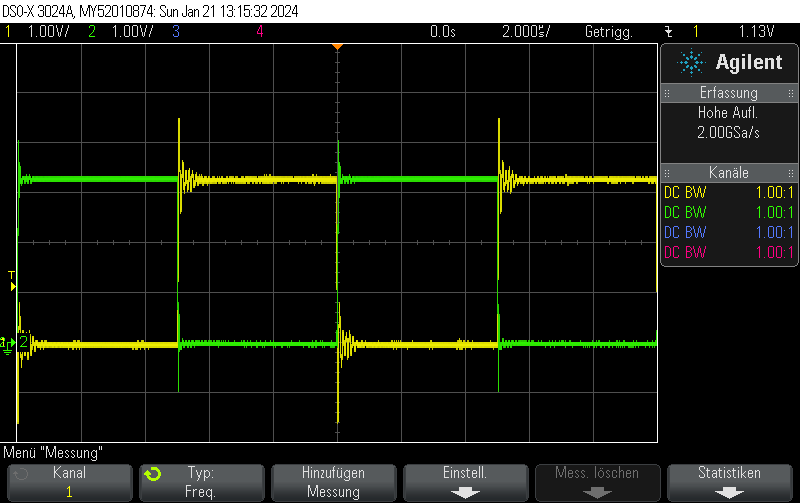
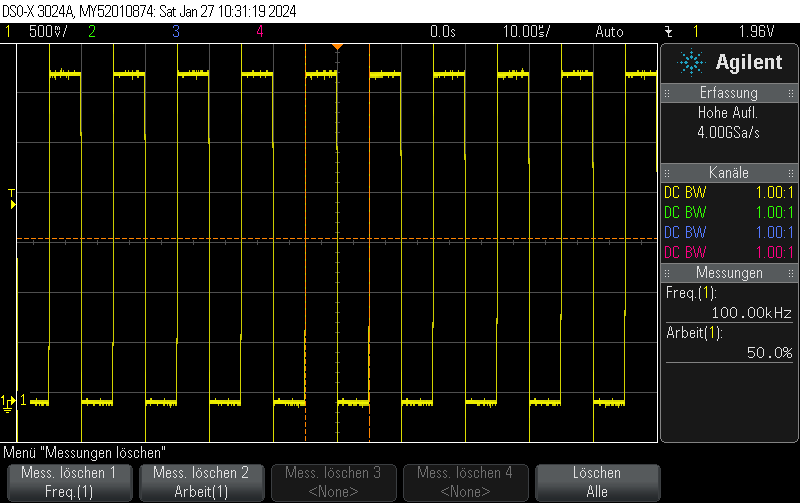
- 100 kHz on GPIO11
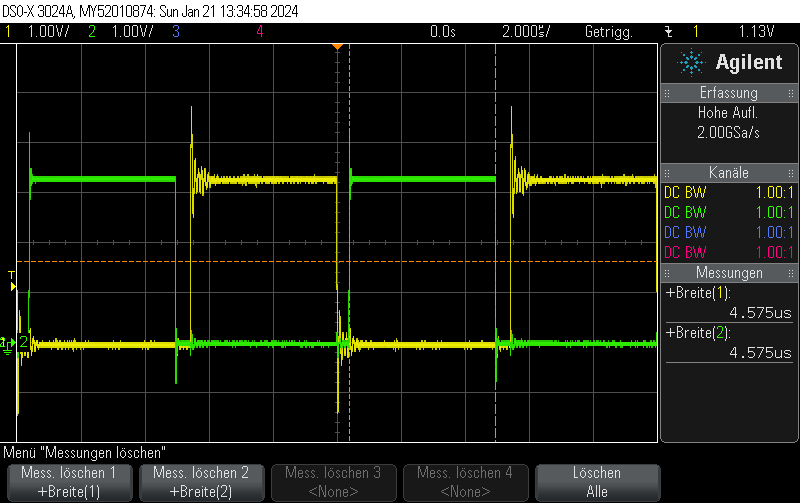
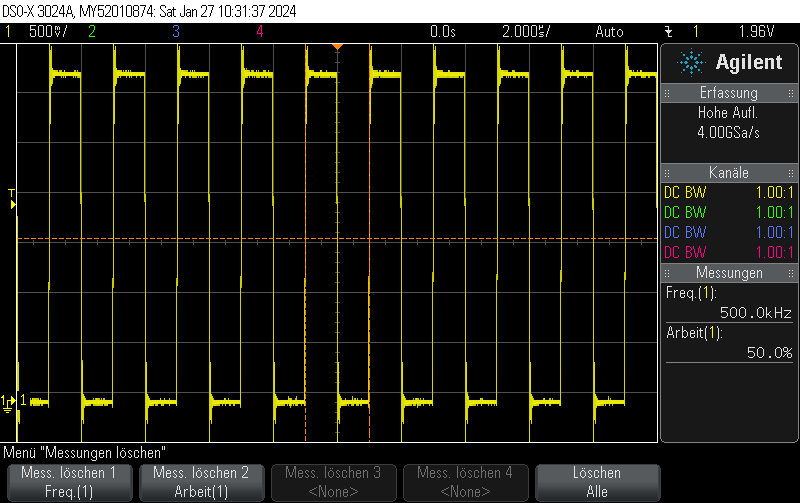
- 500 kHz on GPIO12
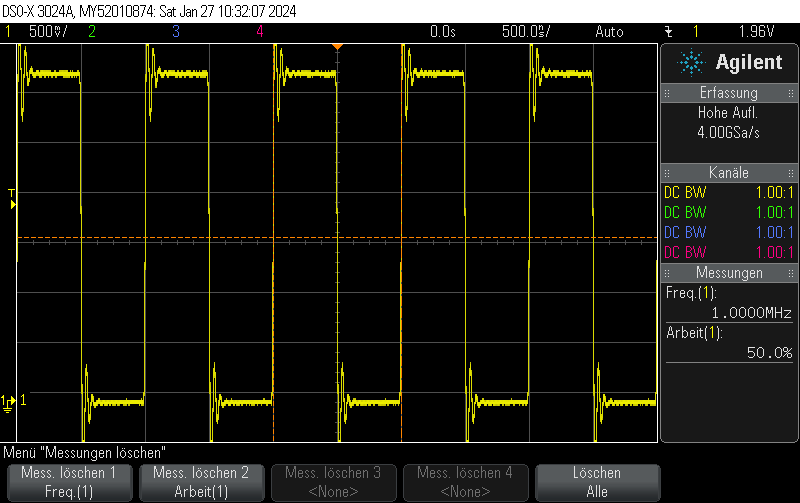
- 1 MHz on GPIO13
#include <Arduino.h>
#include <driver/ledc.h>
void setup() {
ledc_timer_config_t ledc_timer1 = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_1_BIT,
.timer_num = LEDC_TIMER_0,
.freq_hz = 10000,
.clk_cfg = LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer1));
ledc_timer_config_t ledc_timer2 = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_1_BIT,
.timer_num = LEDC_TIMER_1,
.freq_hz = 100000,
.clk_cfg = LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer2));
ledc_timer_config_t ledc_timer3 = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_1_BIT,
.timer_num = LEDC_TIMER_2,
.freq_hz = 500000,
.clk_cfg = LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer3));
ledc_timer_config_t ledc_timer4 = {
.speed_mode = LEDC_LOW_SPEED_MODE,
.duty_resolution = LEDC_TIMER_1_BIT,
.timer_num = LEDC_TIMER_3,
.freq_hz = 1000000,
.clk_cfg = LEDC_AUTO_CLK
};
ESP_ERROR_CHECK(ledc_timer_config(&ledc_timer4));
/**
* @brief Configure LEDC output channels
*/
ledc_channel_config_t ledc1 = {
.gpio_num = GPIO_NUM_10,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_0,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = LEDC_TIMER_0,
.duty = 1, // Set duty to 50%
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc1));
ledc_channel_config_t ledc2 = {
.gpio_num = GPIO_NUM_11,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_1,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = LEDC_TIMER_1,
.duty = 1, // Set duty to 50%
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc2));
ledc_channel_config_t ledc3 = {
.gpio_num = GPIO_NUM_12,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_2,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = LEDC_TIMER_2,
.duty = 1, // Set duty to 50%
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc3));
ledc_channel_config_t ledc4 = {
.gpio_num = GPIO_NUM_13,
.speed_mode = LEDC_LOW_SPEED_MODE,
.channel = LEDC_CHANNEL_3,
.intr_type = LEDC_INTR_DISABLE,
.timer_sel = LEDC_TIMER_3,
.duty = 1, // Set duty to 50%
.hpoint = 0
};
ESP_ERROR_CHECK(ledc_channel_config(&ledc4));
}
void loop() {
// Nothing to do here
delay(1000);
}
GPIO10
GPIO11
GPIO12
GPIO13